我们的肌肉有个特别的本领:
既能收缩发力,带动身体运动,
也能感知自身变化,反馈身体姿态。
如今,这种能力
也被中国科学技术大学研究团队
“复刻”到了机器人身上。
记者从中国科学技术大学获悉,日前,该校工程科学学院、人形机器人研究院王洪波研究员团队受生物肌肉启发,研发出一种具备自感知能力的仿生人工肌肉,并基于该技术构建出可实现多模态运动的柔性移动机器人。相关成果已发表在综合性国际期刊《创新》上。
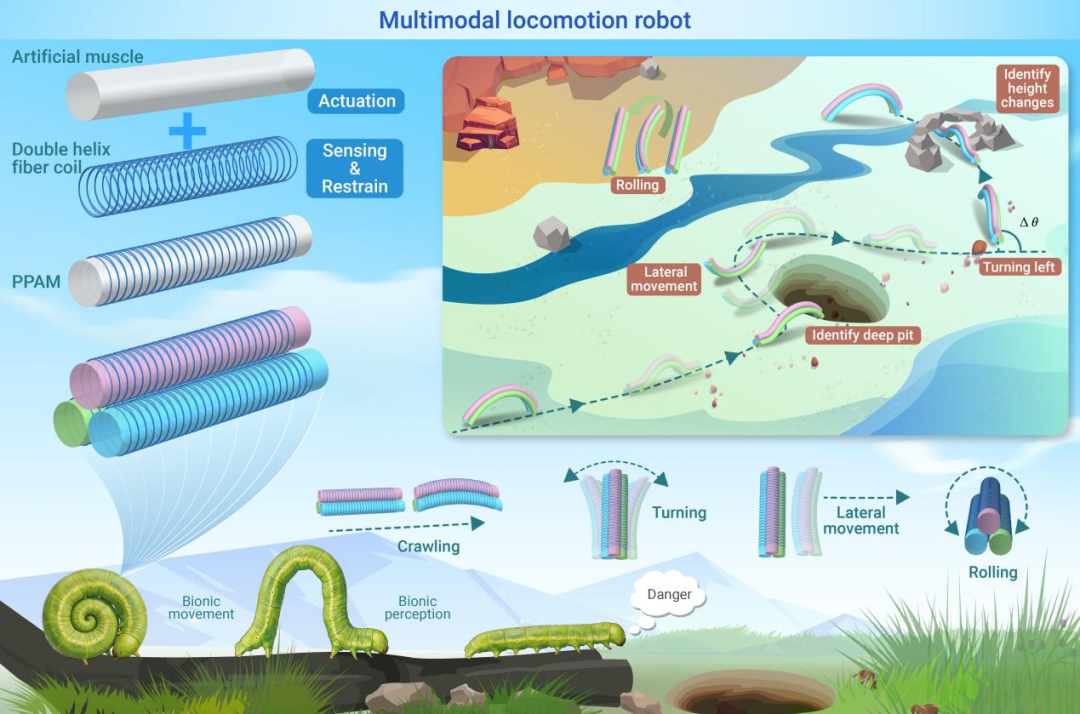
仿生人工肌肉赋能的多模态移动机器人示意图(图源:中国科学技术大学)
试想一下,当机器人穿梭坑洼、狭小的复杂空间,单单依靠摄像头看清周边环境,能平稳灵活行动吗?
对人和动物来说,这种能力并不陌生:闭上眼睛,我们也能感知手臂有没有抬起、腿有没有弯曲。这背后依靠的正是肌肉和神经系统对身体状态的实时反馈。
反观柔性机器人,柔性机身赋予它灵活行动的先天优势,可柔软形变的特性也反倒让它很难像硬质传统机器人那样精准识别自身动作姿态。
因此,柔性机器人的自我感知能力成了研究者们亟待突破的瓶颈。
如何复刻生物肌肉“发力+感知”一体的双重本领?
中国科大团队找到了全新思路。研究人员以硅胶打造柔软基底管体,外部缠绕两组反向排布的导电纤维,构筑出酷似DNA的双螺旋构型。这套精巧结构,既能模仿生物肌肉完成伸缩驱动,又化身感知神经,实时捕捉自身形变、运动数据并反馈信号。
实验显示,这种人工肌肉反复伸缩超过20000次后,仍能保持较高精度和稳定性能。基于这一人工肌肉,研究团队把三组组件以三角形排列组合,搭建出一个模块化柔性移动机器人。通过控制三根人工肌肉的充气和放气时序,机器人可以完成蠕动前进、横向平移、整体翻滚、精准转向等多种动作。
更重要的是,这款机器人还能够实时监测自身姿态,根据地形和外界刺激调整动作幅度。比如遇到障碍时,可以尝试绕行;通过狭窄通道时,可以调整身体形态;在倾斜或翻倒时,也能自动恢复平衡。
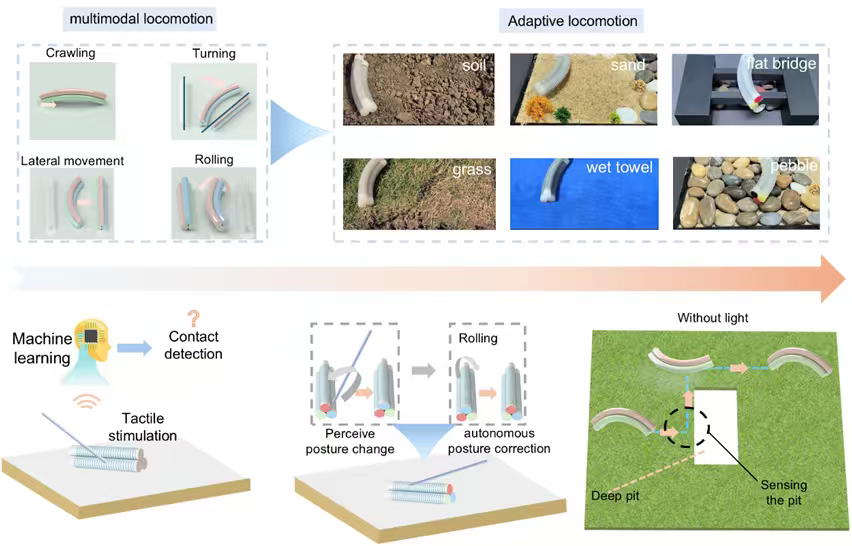
自感知移动机器人多模态运动及环境适应表现(图源:中国科学技术大学)
研究团队还将机器学习算法引入其中,让机器人能够识别不同的外界交互刺激并作出相应响应。这意味着,柔性机器人未来有望不再只是机械执行动作,而是具备更强的环境适应能力。
来源:合肥日报(2026-6-11)
原文链接:https://mp.weixin.qq.com/s/6qGVEsA6S2y0kFEY7CavGw




