近日,中国科学技术大学工程科学学院王洪波研究员团队从生物肌肉结构中获得灵感,成功研制出一种双螺旋纤维增强的自感知人工肌肉。基于三组人工肌肉的模块化组合,构建了多模态仿生移动机器人,实现了爬行、平动、转向、翻滚四种运动模式,以及多地形自适应移动与外界刺激感知决策能力。该研究为高度智能化探索作业机器人的发展提供了一种新的技术路径,同时也为基于人工肌肉构建感知型柔性操作器提供了新的设计思路,在软体机器人与智能驱动领域具有重要的研究意义和应用前景。成果以“A soft perceptive multimodal locomotion robot via double-helix fiber reinforced artificial muscles”为题发表在综合性国际期刊《创新》(The innovation)上。
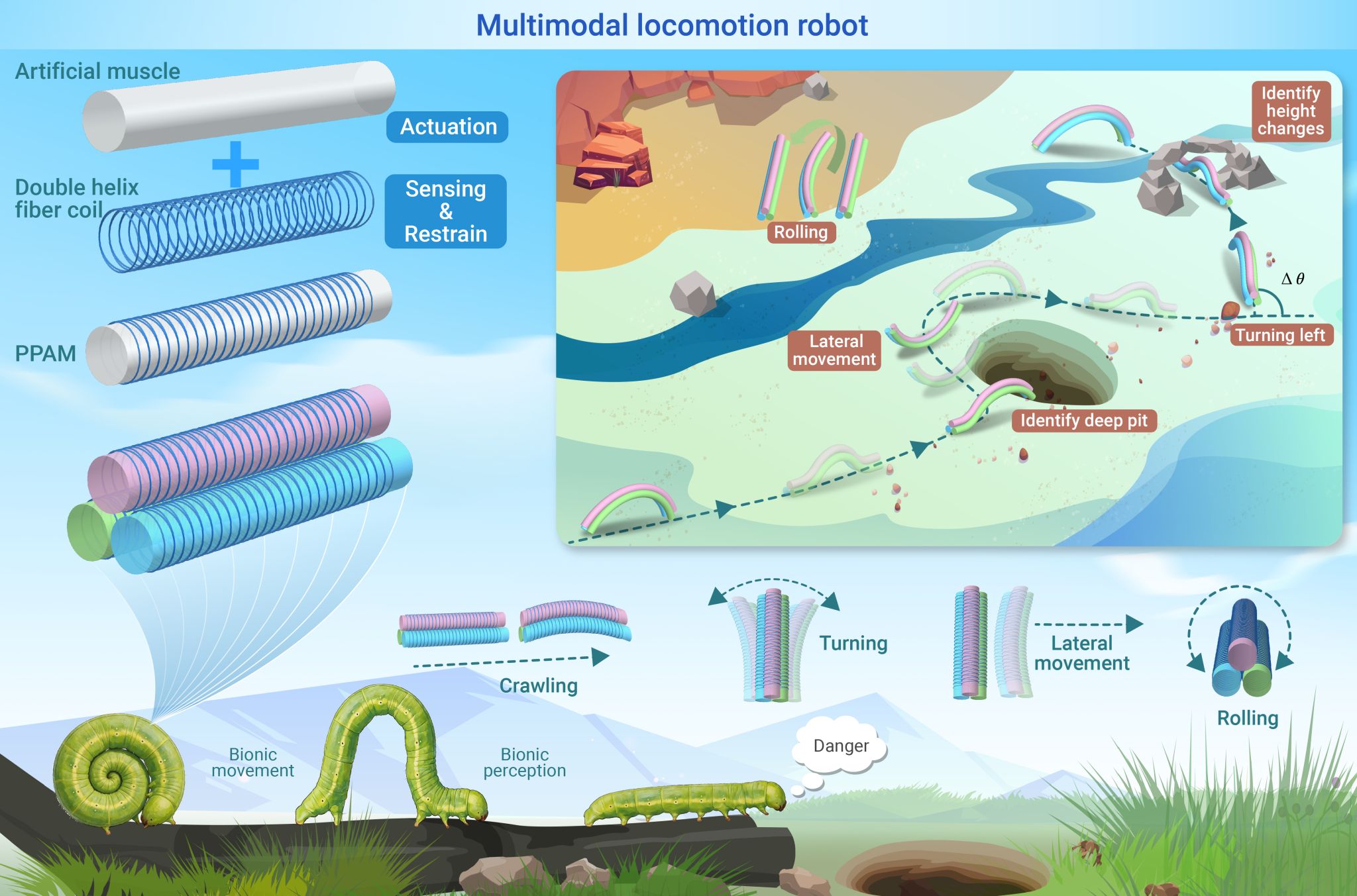
图1 自感知人工肌肉驱动的多模态仿生移动机器人总览
生物肌肉不仅具有优异的延展性与弹性,还能够实时感知自身的拉伸状态,这主要得益于其特殊结构以及内部的本体感受机制。与之相比,尽管气动人工肌肉在结构和驱动方式上与生物肌肉具有一定相似性,并因此受到广泛关注,但其本体感知能力仍存在局限性。受人体肌肉中肌梭结构的启发,研究团队设计了一种基于双螺旋导电纤维增强结构的气动人工肌肉(图2)。该人工肌肉由带有线槽的圆柱形硅胶管和嵌入其中的双螺旋导电纤维线圈构成。
其工作原理如下:不可拉伸的双螺旋导电纤维有效限制了人工肌肉的径向膨胀,当内部腔室充气加压时,人工肌肉产生轴向伸长;双螺旋纤维同时构成类似弹簧的螺旋感应线圈,其电感值随人工肌肉长度变化而单调变化。通过实时测量线圈电感,可实现对人工肌肉长度的高精度自感知,无需外部传感器。研究团队建立了相应的静力学分析模型与感知等效电路模型,结合有限元仿真对结构参数和驱动性能进行了系统优化。
经严格测试,该自感知人工肌肉具备以下性能优势:感知分辨率0.01 mm、迟滞误差仅1.05%、循环耐久性超过20000次,并具有良好的模块化可扩展性,可根据任务需求灵活组合。
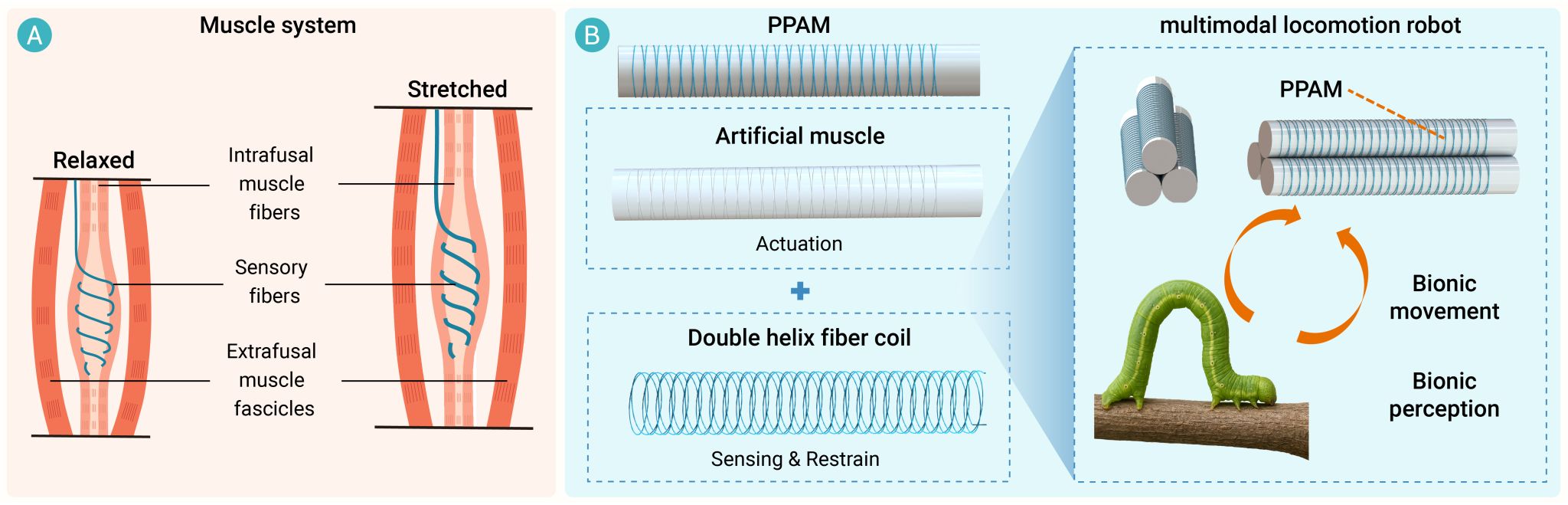
图2 仿生肌梭结构启发的自感知人工肌肉:结构示意与感知原理
在此基础上,借鉴尺蠖等爬行生物的运动机制,研究团队将三组自感知人工肌肉捆绑组合,构建了一种由多腔室气压协调控制的柔性移动机器人。通过设计不同的充放气时序,机器人可实现四种基本运动模式(图3):
爬行:模拟分节爬行动物的蠕动步态,适用于有一定摩擦力的平坦或起伏地面;
平动:横向滑行,适用于草地、泥地、平板桥及浅水区域;
翻滚:整体翻转,可快速穿越沙地和鹅卵石等松软地形;
转向:通过差动控制实现原地或行进中的方向调整。
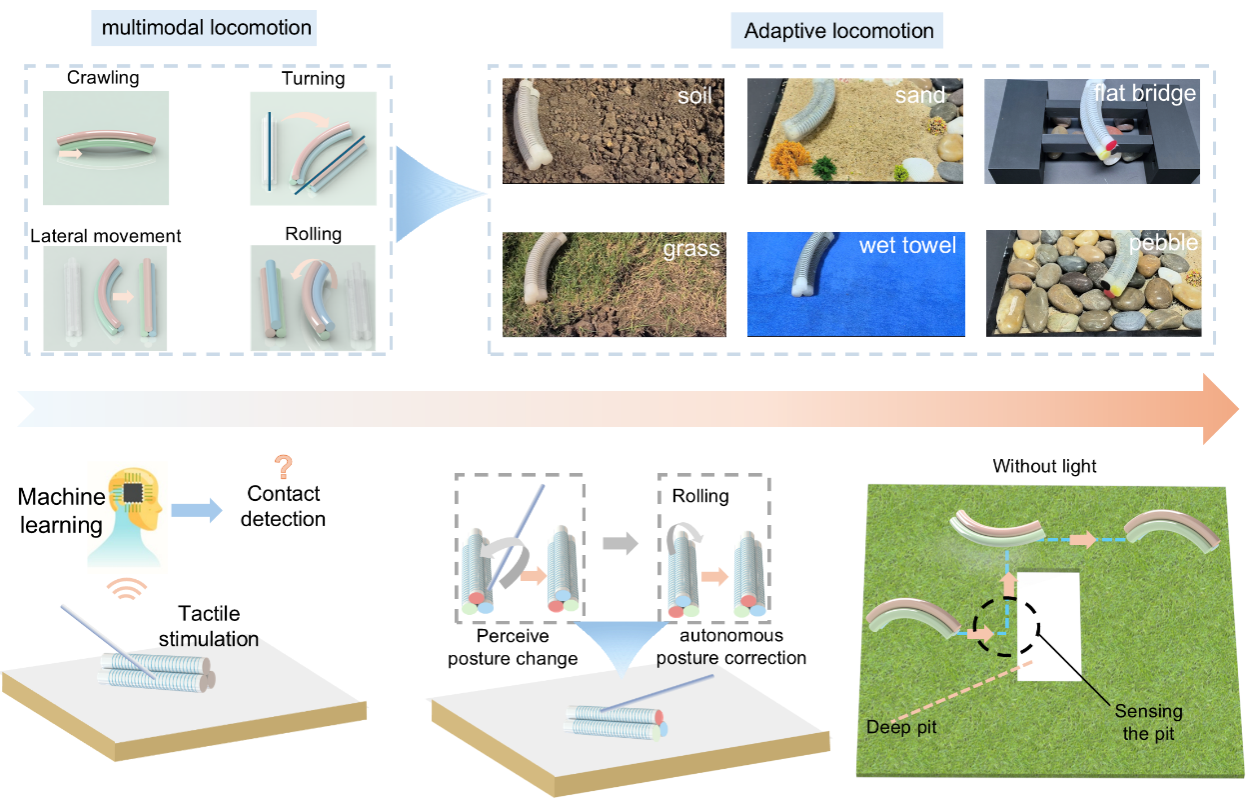
图3 多模态运动与智能感知行为实验验证
在自然界中,大多数爬行生物的视觉能力相对有限,主要依赖体表机械感受器感知环境中的物理接触和地形变化。受此启发,研究团队充分利用机器人感知-驱动一体化设计的优势,使机器人能够基于自身感知信息进行环境感知与运动决策(图3)。
实验结果表明,该移动机器人具备以下智能感知与决策能力:
障碍绕行:机器人能够在有光和黑暗环境下感知前方深坑,并主动调整路径绕行通过;
窄道穿越:机器人通过实时感知身体压缩量,自动调节运动幅度穿越低矮隧道;
姿态自恢复:机器人能够实时感知自身姿态,在移动中发生侧翻时自动调整恢复稳定运动;
外界刺激识别:借助机器学习方法,机器人可对不同类型的外界交互刺激进行识别与分类。
工程科学学院精密机械与精密仪器系博士生汪宇峰为论文第一作者。工程科学学院、人形机器人研究院王洪波研究员、吴后平副研究员为论文通讯作者。该项研究工作得到了国家自然科学基金项目、中国科学院引才计划青年项目、中国科学技术大学高层次人才引进计划和安徽省科技攻坚计划项目重大项目以及中央高校基本业务费的支持。
论文链接:https://doi.org/10.1016/j.xinn.2026.101320
(工程科学学院 人形机器人研究院 科研部)




